

Servo zum Getriebemotor umbauen
Servos lassen sich zu hervorragenden Getriebemotoren umbauen. So kann man sie für alle möglichen Antriebe einsetzen, wie zum Beispiel Seilwinden oder Roboterantriebe.
Diese Anleitung mit vielen Bildern leitet dich Schritt für Schritt durch den Umbau.

Bild 1: Servo zum Getriebemotor umbauen
Ein Servo, der zum Getriebemotor umgebaut wurde, kann sich endlos drehen. Er wird nicht mehr mit einem PWM Signal angesteuert,
sondern direkt mit einem DC Signal von 0V bis 5V. Einen Servo umzubauen wird auch „Servo hacking“ genannt. Ein gehackter Servo
lässt sich dank seinem rechteckigen Gehäuse mit Befestigungsösen gut in eine Maschine einbauen. Da Servos nur wenige Euro kosten,
sind Getriebemotor-Servos äusserst günstig.
Dieses Tutorial beschreibt den Umbau eines Servos zum Getriebemotor, so dass er mit einem DC Signal angesteuert werden kann. Die Variante zur Ansteuerung mit dem klassischen PWM Signal eines RC Empfängers findest du ebenfalls auf electronicsplanet.
Dieses Tutorial beschreibt den Umbau eines Servos zum Getriebemotor, so dass er mit einem DC Signal angesteuert werden kann. Die Variante zur Ansteuerung mit dem klassischen PWM Signal eines RC Empfängers findest du ebenfalls auf electronicsplanet.
Schritt 1: Gehäuse öffnen
Entferne als erstes die Stellkreuzschraube des zukünftigen Getriebemotors mit einem kleinen Schraubenzieher.
Bild 2: Schraube am Servokreuz lösen
Ist die Schraube entfernt, kann das Kreuz von Hand abgenommen werden.
Schraube und Kreuz werden vorerst nicht mehr benötigt und beiseite gelegt.

Bild 3: Servokreuz entfernen
Auf der unteren Seite des Servos befinden sich vier kleine Schrauben.

Bild 4: Unterseite des Servogehäuse
Diese werden ebenfalls mit einem Kreuzschlitzschraubenzieher entfernt

Bild 5: Die vier Schrauben entfernen
Jetzt kann die Bodenplatte vom Gehäuse abgenommen werden. Darunter kommt die Servoelektronik zum Vorschein.
Schrauben und Bodenplatte werden erst dann weider benötigt, wenn wir den Umbau zum Getriebemotor abgeschlossen haben. Du kannst sie zur Seite legen.
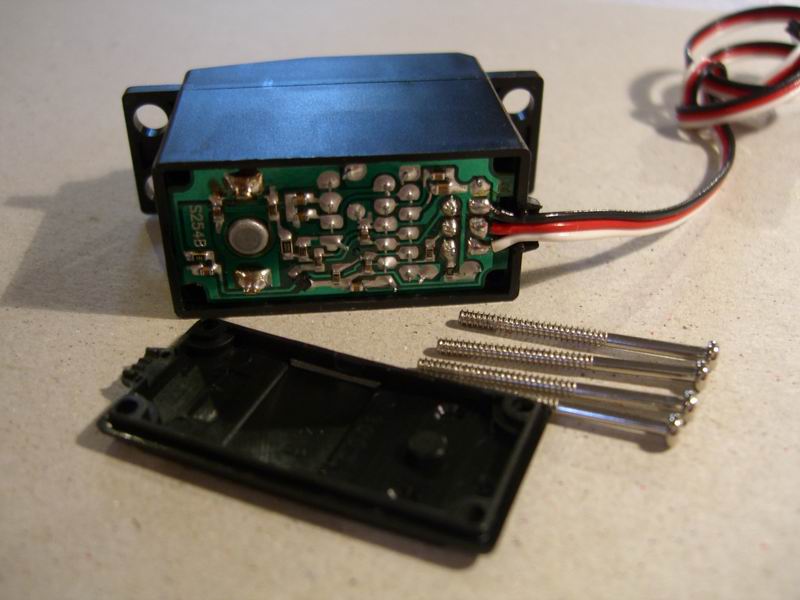
Bild 6: Gehäuseboden entfernen
Der Deckel des Getriebefachs kann jetzt auch abgenommen werden. Darunter kommt das Getriebe zum Vorschein.

Bild 7: Den Getrieberaumdeckel abnehmen
Der Deckel wird vorerst nicht mehr benötigt und beiseite gelegt.

Bild 8: Getriebe von oben
Schritt 2: Zerlegung des Getriebes
Wer sich mit dem Servogetriebe noch nicht auskennt, macht sich am besten zuerst mit seiner
Funktionsweise vertraut und betrachtet, wie die Zahnräder ineinander greifen.
Dies ist das Getriebe des Getriebemotors. Für den Umbau des Servos müssen wir es auseinandernehmen.
Das Getriebe ist mit einer meist weissen Paste geschmiert. Es soll darauf geachtet werden, dass möglichst wenig dieser Paste verloren geht.
Dies ist das Getriebe des Getriebemotors. Für den Umbau des Servos müssen wir es auseinandernehmen.
Das Getriebe ist mit einer meist weissen Paste geschmiert. Es soll darauf geachtet werden, dass möglichst wenig dieser Paste verloren geht.

Bild 9: Getriebe von der Seite
Zuerst wird das Doppelzahnrad oben in der Mitte entfernt.

Bild 10: Mittleres Zahnrad abnehmen
Anschliessend können das Doppelzahnrad links und das Endachsenzahnrad rechts entfernt werden.

Bild 11: Seitliche Zahnräder entfernen
Zum Schluss werden das Doppelzahnrad unten in der Mitte und die beiden Achsen entfernt.
Die Getriebeteile werden beiseite gelegt.
Die Getriebeteile werden beiseite gelegt.

Bild 12: Achsen und unteres Zahnrad abnehmen
Schritt 3: Entfernen der Servoelektronik
Wir betrachten die Zwischenwand, die durch das entfernen des Getriebes frei geworden ist: Links sehen wir den Motor.
Rechts, die Achse des Potentiometers. Dieses Potentiometer ist immer irgendwie von unten auf der Zwischenwand fixiert. Diese
Fixierung gilt es zu lösen. Folgende verschiedene Situationen gibt es:
- Das Poti ist mit einer Sechskantmutter festgeschraubt.
- Das Potentiometer ist von unten mit Widerhaken eingeklinkt.
- Das Potentiometer ist von unten mit Widerhaken eingeklinkt und mit soliden Metallsteifen mit der Servoelektronik verbunden.

Bild 13: Servo ohne Getriebe von oben
Falls es sich um die zweite oder dritte Variante handelt:
Versuchen Sie VORSICHTIG die Servoelektronik von unten herauszuziehen. Dazu kann ein Messer zum Heraushebeln verwendet
werden. Ist das Potentiometer nach der zweiten Variante befestigt, kann die Elektronik einfach herausgezogen werden.
Lösen sie die Widerhaken von der Seite auf der sich das Poti befindet und ziehen sie das Poti heraus.
Lässt sich die Platine nicht einfach herausziehen, ist das Potentiometer nach der dritten Variante befestigt.
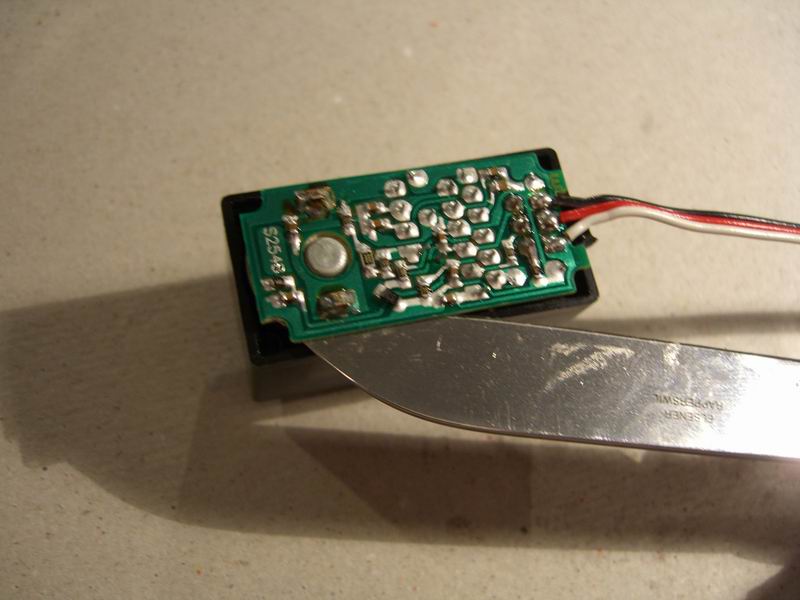
Bild 14: Servoelektronik abheben
Falls es sich um die dritte Variante handelt:
Dies ist die schwierigste Variante, da die Widerhaken gelöst werden müssen, bevor, die Elektronik entfernt werden
kann. Lösen Sie die Widerhaken mit einem spitzen Gegenstand durch die kleinen Löcher in der Zwischenwand. Das ist
nicht ganz einfach. Indem man die Potiachse mit dem Finger herunterdrückt, kann man verhindern, dass die Haken wieder einschnappen.
Das nächste Bild zeigt die Widerhaken von unten, was das Lösen etwas vereinfacht. Wer bereits etwas Erfahrung im
Servohacking hat, kann erahnen, welche Lötstellen zum Potentiometer gehören. In dem Fall kann man natürlich das
Potentiometer entlöten bevor man die Platine entfernt.
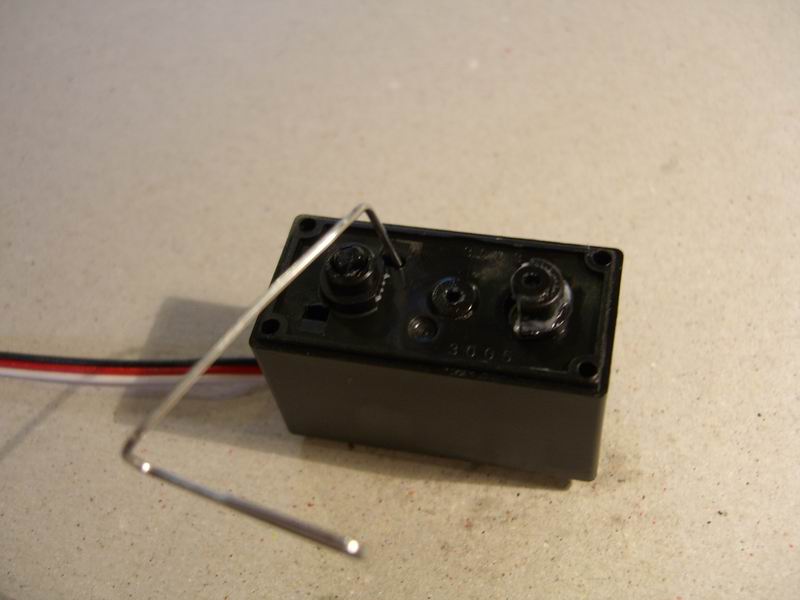
Bild 15: Haken mit Büroklammer lösen
Die Widerhaken sind auf der rechten Seite, ober- und unterhalb des Loches.
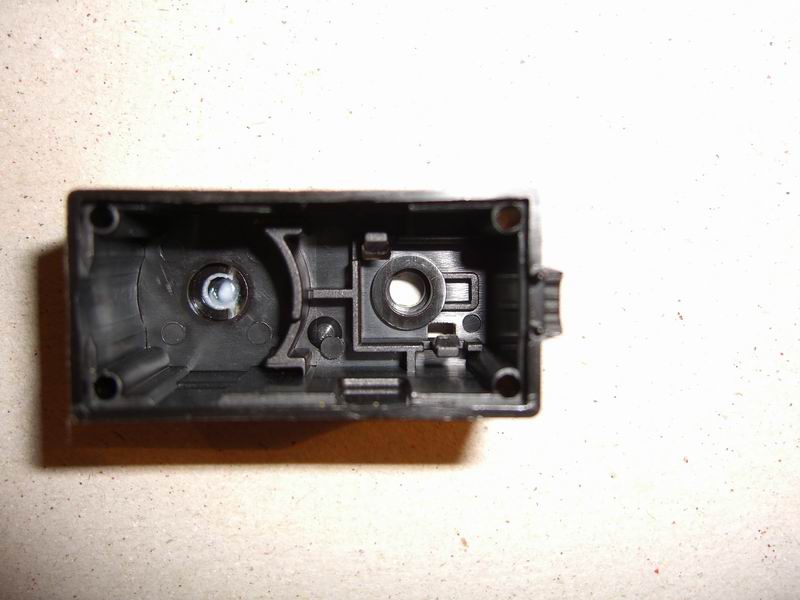
Bild 16: Die Widerhaken, die das Potentiometer halten
Wurden die Widerhaken gelöst, kann auch bei der dritten Variante die Elektronik aus dem Gehäuse entfernt
werden. Die Elektronik kann beiseite gelegt werden.

Bild 17: Servoelektronik entfernen
Schritt 4: Überprüfen der Endachse ohne Potentiometer
Beim Umbau eines Servos zum Getriebemotor, wird das Potentiometer entfernt. Jetzt geht es darum, zu testen,
ob die Endachse auch ohne Potentiometer das Endachsenzahnrad führen kann.
Das Endzahnrad wird auf die Achse aufgesetzt. Es muss überprüft werden, ob die Achse auch ohne Potentiometer
dem Zahnrad halt gibt. Das Zahnrad muss auch ohne Potentiometer fest auf der Achse sitzen und darf keinen Spielraum haben.

Bild 18: Endzahnrad aufsetzen
Der Deckel wird aufgesetzt und das Zahnrad wird von Hand gedreht. Es darf sich ausser in der Drehachse
in keiner Richtung bewegen lassen, sondern muss sauber geführt werden. Es ist normal, dass sich das
Zahnrad nur in einem beschränktem Winkel drehen lässt, da der mechanische Endanschlag vom Servo noch nicht entfernt wurde.
Für den Umbau vom Servo zum getriebemotor werden wir diesen Anschlag etwas später entfernen.
Lässt sich das Zahnrad nicht mehr sauber bewegen, hatte das Potentiometer eine achsführende
Funktion. In dem Fall ist der Servo möglicherweise nicht zum umbau zum Getriebemotor geeignet. Als Notfallmassnahme kann man
versuchen, den Umbau in der Variante mit Potentiometer durchzuführen. Lesen Sie in diesem Fall bitte am Ende dieser Seite weiter.
Legen sie das Gehäuse das Endzahnrad und den Deckel wieder beiseite.

Bild 19: Drehung prüfen
Schritt 5: Entfernen des mechanischen Anschlags am Endzahnrad
Wir sind schon ein gutes Tück vorangekommen auf dem Weg vom Servo zum Getriebemotor. Abe jetzt kommt das Werkzeug zum Einsatz!
Auf den folgenden drei Bildern ist der mechanische Anschlag zu sehen, der für den beschränkten
Drehwinkel des Endzahnrades verantwortlich ist. Es handelt sich dabei um das vorstehende Stück,
das auf den ersten beiden Bildern rechts und auf dem dritten Bild links zu sehen ist. Dieser Anschlag muss für den Umbau zum Getriebemotor entfernt werden.

Bild 20: Zahnradanschlag von oben

Bild 21: Zahnradanschlag

Bild 22: Zahnradanschlag von der Seite
Viele Servohackinganleitungen weisen an, den Anschlag abzufeilen. Dies funktioniert zwar, führt jedoch fast immer
zu einer Beschädigung des Zahnrades, wodurch es sich nicht mehr gleichmässig dreht.
Damit der Getriebemotor sauber dreht, muss der Anschlag bis auf Höhe der Zähne entfernt
werden. Wenn möglich sogar etwas tiefer. Dabei wird die Feile zwangläufig die Zähne des Zahnrades mit abfeilen.
Selbst wenn man den Anschlag nur bis auf Zahnradhöhe abfeilen will und nicht tiefer, wird die Feile die Zähne
sicher etwas beschädigen.
Deshalb: Finger weg von der Feile.

Bild 23: Nicht mit der Feile bearbeiten
Stattdessen sollte der Anschlag mit einer Klinge weggeschnitten werden. Dabei wird die Klinge
wie eine Säge hin und her bewegt. Beim Futaba 3003 hat dies problemlos funktioniert. Gibt es
Schwierigkeiten, sollte man sich nach einer schärferen Klinge umschauen und sie eventuell über
einer Flamme erhitzen. Die Klinge sollte die Zähne des Rades nicht berühren.

Bild 24: Mit dem Messer abschneiden
Es sollte problemlos möglich sein, den Anschlag tiefer als die Zähne abzuschaben.
Auch an der Achse darf nichts mehr vorstehen. Am besten wird sogar ein Stück von der Achse mit
abgeschabt.
Dieses Bild zeigt den Querschnitt durch das Zahnrad. Rot ist die Fläche des Anschlages, die
unbedingt entfernt werden muss. Um ein 100%-ig sauberes drehen der Achse zu garantieren, muss
auch die orange Fläche entfernt werden. Die Zähne (blau) müssen dabei jedoch unberührt bleiben.
Sollte sich der Plastik nicht schneiden lassen, wird es schwierig. Dem Autor dieses Tutorials
ist dieser Umstand noch nie begegnet. Vermutlich lässt sich der Anschlag mit einem spitzen
Seitenschneider wegknipsen. Anschliessend müssen leider doch mit einer Feile die immer noch
vorstehenden Reste abgefeilt werden. Am besten wird vermutlich eine halbrunde Miniaturfeile
verwendet, da mit einer solchen der Zahnradkontakt weitgehend verhindert werden kann.

Bild 25: Anschlag etwas vertieft ausnehmen
Schritt 6: Überprüfen der Endachse ohne Anschlag
Das Zahnrad wird wieder auf das Servogehäuse aufgesetzt und der Deckel wird geschlossen.
Bild 26: Endzahnrad wieder einsetzen
Von Hand wird die Endachse gedreht. Sie muss sich jetzt wie beim Getriebemotor um 360 Grad drehen lassen. Dabei darf kein
Widerstand spürbar sein. Wenn man spürt, dass das Zahnrad an gewissen Stellen hängen bleibt,
ist das ein Zeichen dafür, dass der Anschlag nicht sauber entfernt wurde und
am Gehäuse ansteht. In diesem Fall muss der Anschlag nochmals nach der Querschnittzeichnung verkleinert werden.
Bild 27: Drehung prüfen
Schritt 7: Modifikation der Servoelektronik
Als nächstes wird die ausgebaute Servoelektronik benötigt.

Bild 28: Servoelektronik mit Potentiometer
Auf der unteren Seite der Platine sind üblicherweise sowohl SMD wie auch troughhole Komponente eingelötet.
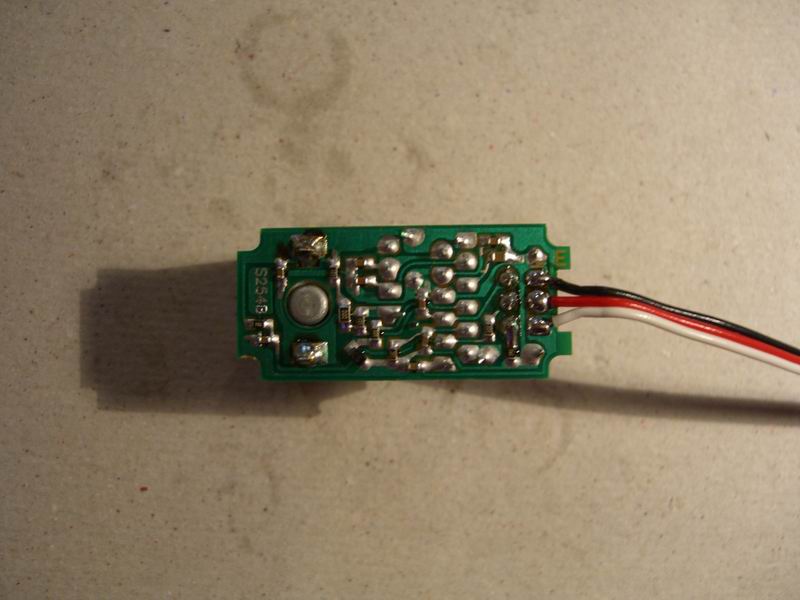
Bild 29: PCB Unterseite mit Potentiometer eingelötet
Mit Lötkolben und Entlötwerkzeug wird das Potentiometer entfernt.
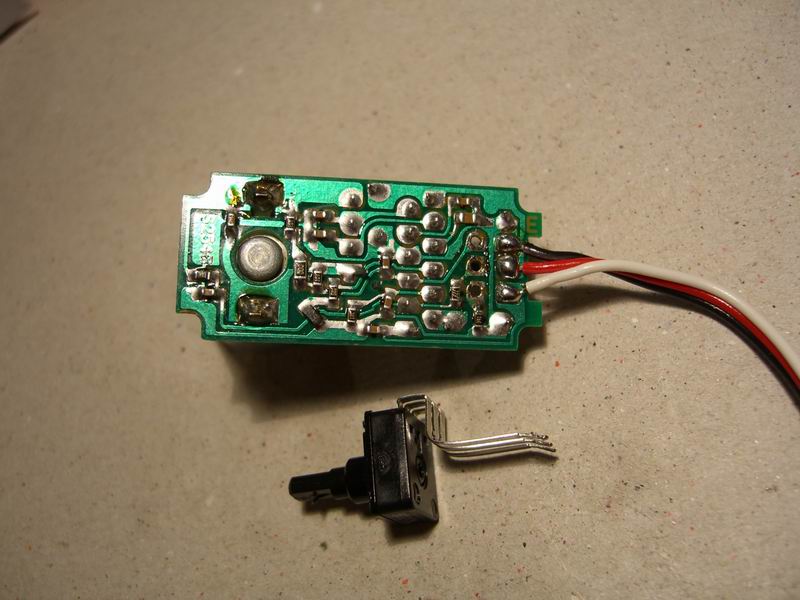
Bild 30: PCB Unterseite mit Potentiometer ausgelötet
Die beiden Anschlüsse des Motors werden vom Rest der Schaltung isoliert. Am einfachsten geht
dies, indem man mit einem Messer alle Leiterbahnen die zum Motor führen durchtrennt.
Oft ist zwischen beiden Motoranschlüssen ein (SMD)-Kondensator angeschlossen. Dieser muss nicht
abgetrennt werden, da er auch im DC-Betrieb die Betriebseigenschaft des Motor verbessert. Im Bild
ist er durch den grünen Kreis markiert.
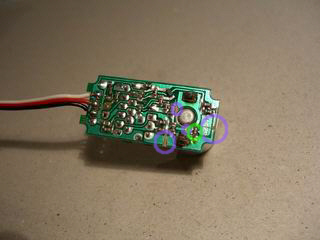
Bild 31: Motorleiterbahnen unterbrechen
Das Anschlusskabel wird abgelötet und zwei der Adern werden direkt auf die Motoranschlüsse
aufgelötet. Dabei ist zu achten, dass die Lötstellen nicht zu hoch werden, da sonst die Bodenplatte
nicht mehr sauber auf den Servo aufgesetzt werden kann.
Baut man für eine Anlage mehrere Servos um, sollte man darauf achten, die Kabelfarben immer gleich herum anzulöten.
Die dritte, überflüssige Ader muss von den Motoranschlüssen ferngehalten werden. Am besten wird sie nahe beim Stecker abgeschnitten.

Bild 32: DC Kabel anbringen
Man sollte Beschädigungen des Kabels durch die spitzen Lötstellen vorbeugen. Deshalb dazu können entweder
alle überflüssigan Bauteile ausgelötet werden, oder das Kabel muss mit einem soliden Stück Papier oder
Karton von der Platine getrennt werden. Um Platzprobleme beim schliessen des Servobodens zu lösen
müssen bei der Papiervariante möglicherweise die Anschlussbeine der eingenlöteten Bauteile auf de
Unterseite der Platine gekürzt werden.

Bild 33: DC Kabel Schutzkarton
Schritt 8: Servo wieder zusammenbauen
Auf den folgenden Bildern ist die dritte Kabelader noch zu sehen. In Wirklichkeit ist sie nicht mehr vorhanden.
Der Umbau ist somit abgeschlossen und der Getriebemotor kann wieder zusammengebaut werden.
Zuerst wird die Ektronik eingesetzt.
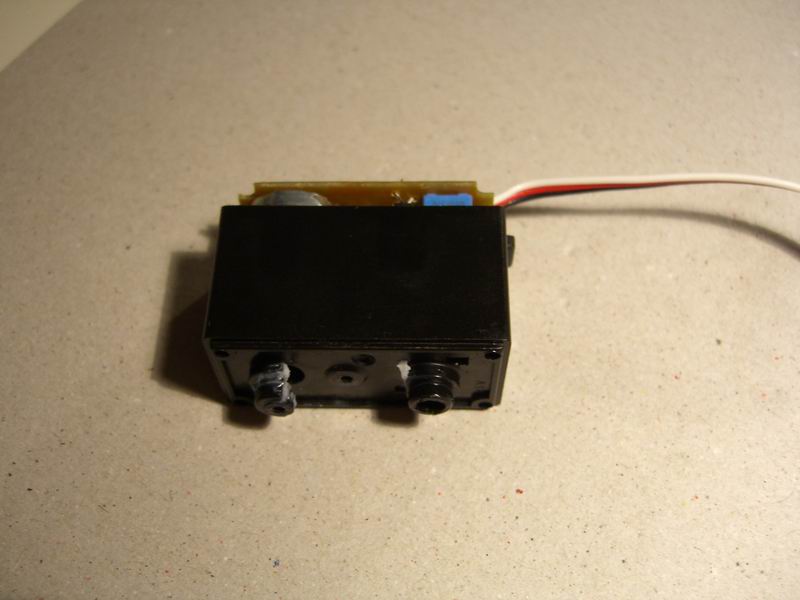
Bild 34: Elektronik ins Gehäuse einsetzen
Das Getriebe wird zusammengesetzt. Zuerst die Achsen und das untere, mittlere Zahnrad.
Bild 35: Mittleres Zahnrad und Achsen einsetzen
Anschliessend die beiden Zahnräder links und rechts.
Bild 36: Seitliche Zahnräder einsetzen
Zum Schluss das Zahnrad oben in der Mitte.
Bild 37: Letztes Zahnrad einbauen
Der Deckel wird auf den Getriebemotor aufgesetzt.
Bild 38: Gehäusedeckel aufsetzen
Die Bodenplatte und das Servokreuz werden wieder festgeschraubt.
Bild 39: Gehäuseboden und Schrauben wieder einsetzen
Was wie ein Servo aussieht ist nun in Wirklichkeit ein DC- Getriebemotor. Gib 5V DC auf die Kabel um ihn drehen zu lassen.
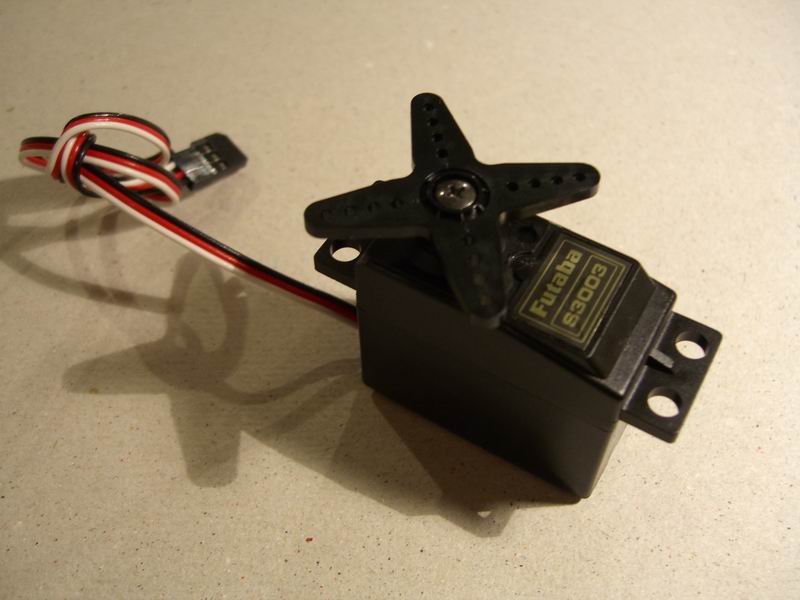
Bild 40: Fertig ist der Umbau
Falls das Endzahnrad ohne Potentiometer nicht sauber geführt wird:
Bei deinem Servo hat das Potentiometer offenbar eine achsenführende Funktion und kann nicht
einfach so entfernt werden. Es geht nun darum, die 360 Grad-Drehung mit eingebautem Potentiometer
zu realisieren. Dies ist ein Problem, das oft nicht einfach zu lösen ist. Es sollte in Betracht
gezogen werden, den Servo wieder zusammenzubauen und einen anderen Servotyp auszuprobieren. Es gibt
jedoch Möglichkeiten den Servo auch mit eingebautem Potentiometer um 360 Grad drehen zu lassen.
Dazu muss man das Endachsenzahnrad oder die Potentiometerachse so zu bearbeiten, dass man das
Zahnrad auf das Potentiometer aufsetzen und vollständig rundherum drehen lassen kann.
Die Potentiometerachse und das Zahnrad sind immer irgendwie ineinander verkeilt, so dass sich die Drehung vom Zahnrad auf das Poti überträgt. Diese Kopplung muss aufgehoben werden.
Es gibt folgende Möglichkeiten: * Die Potentiometerachse so weit kürzen, dass das Zahnrad nicht mehr greifen kann. * Mit einem Bohrer die Öffnung des Zahnrades aufbohren, so dass das Potentiometer nicht mehr greifen kann. Der Bohrer sollte dabei wenig grösser sein, als die Potentiometerachse.
Wurde eine Zahnradführung mit Poti erfolgreich realisiert, müssen die Potentiometeranschlüsse isoliert werden, damit sie keinen Kontakt zur Platine haben können. Anschliessend kann mit Schritt 5 der Anleitung weitergemacht werden.
Hast du dich entschieden den Servo nicht zum Getriebemotor umzubauen, baust du ihn einfach nach Schritt 8 der Anleitung wieder zusammenzubauen.
Die Potentiometerachse und das Zahnrad sind immer irgendwie ineinander verkeilt, so dass sich die Drehung vom Zahnrad auf das Poti überträgt. Diese Kopplung muss aufgehoben werden.
Es gibt folgende Möglichkeiten: * Die Potentiometerachse so weit kürzen, dass das Zahnrad nicht mehr greifen kann. * Mit einem Bohrer die Öffnung des Zahnrades aufbohren, so dass das Potentiometer nicht mehr greifen kann. Der Bohrer sollte dabei wenig grösser sein, als die Potentiometerachse.
Wurde eine Zahnradführung mit Poti erfolgreich realisiert, müssen die Potentiometeranschlüsse isoliert werden, damit sie keinen Kontakt zur Platine haben können. Anschliessend kann mit Schritt 5 der Anleitung weitergemacht werden.
Hast du dich entschieden den Servo nicht zum Getriebemotor umzubauen, baust du ihn einfach nach Schritt 8 der Anleitung wieder zusammenzubauen.
X
Bild 1: Servo zum Getriebemotor umbauen
Bild 1: Servo zum Getriebemotor umbauen
X
Bild 2: Schraube am Servokreuz lösen
Bild 2: Schraube am Servokreuz lösen
X
Bild 3: Servokreuz entfernen
Bild 3: Servokreuz entfernen
X
Bild 4: Unterseite des Servogehäuse
Bild 4: Unterseite des Servogehäuse
X
Bild 5: Die vier Schrauben entfernen
Bild 5: Die vier Schrauben entfernen
X
Bild 6: Gehäuseboden entfernen
Bild 6: Gehäuseboden entfernen
X
Bild 7: Den Getrieberaumdeckel abnehmen
Bild 7: Den Getrieberaumdeckel abnehmen
X
Bild 8: Getriebe von oben
Bild 8: Getriebe von oben
X
Bild 9: Getriebe von der Seite
Bild 9: Getriebe von der Seite
X
Bild 10: Mittleres Zahnrad abnehmen
Bild 10: Mittleres Zahnrad abnehmen
X
Bild 11: Seitliche Zahnräder entfernen
Bild 11: Seitliche Zahnräder entfernen
X
Bild 12: Achsen und unteres Zahnrad abnehmen
Bild 12: Achsen und unteres Zahnrad abnehmen
X
Bild 13: Servo ohne Getriebe von oben
Bild 13: Servo ohne Getriebe von oben
X
Bild 14: Servoelektronik abheben
Bild 14: Servoelektronik abheben
X
Bild 15: Haken mit Büroklammer lösen
Bild 15: Haken mit Büroklammer lösen
X
Bild 16: Die Widerhaken, die das Potentiometer halten
Bild 16: Die Widerhaken, die das Potentiometer halten
X
Bild 17: Servoelektronik entfernen
Bild 17: Servoelektronik entfernen
X
Bild 18: Endzahnrad aufsetzen
Bild 18: Endzahnrad aufsetzen
X
Bild 19: Drehung prüfen
Bild 19: Drehung prüfen
X
Bild 20: Zahnradanschlag von oben
Bild 20: Zahnradanschlag von oben
X
Bild 21: Zahnradanschlag
Bild 21: Zahnradanschlag
X
Bild 22: Zahnradanschlag von der Seite
Bild 22: Zahnradanschlag von der Seite
X
Bild 23: Nicht mit der Feile bearbeiten
Bild 23: Nicht mit der Feile bearbeiten
X
Bild 24: Mit dem Messer abschneiden
Bild 24: Mit dem Messer abschneiden
X
Bild 25: Anschlag etwas vertieft ausnehmen
Bild 25: Anschlag etwas vertieft ausnehmen
X
Bild 26: Endzahnrad wieder einsetzen
Bild 26: Endzahnrad wieder einsetzen
X
Bild 27: Drehung prüfen
Bild 27: Drehung prüfen
X
Bild 28: Servoelektronik mit Potentiometer
Bild 28: Servoelektronik mit Potentiometer
X
Bild 29: PCB Unterseite mit Potentiometer eingelötet
Bild 29: PCB Unterseite mit Potentiometer eingelötet
X
Bild 30: PCB Unterseite mit Potentiometer ausgelötet
Bild 30: PCB Unterseite mit Potentiometer ausgelötet
X
Bild 31: Motorleiterbahnen unterbrechen
Bild 31: Motorleiterbahnen unterbrechen
X
Bild 32: DC Kabel anbringen
Bild 32: DC Kabel anbringen
X
Bild 33: DC Kabel Schutzkarton
Bild 33: DC Kabel Schutzkarton
X
Bild 34: Elektronik ins Gehäuse einsetzen
Bild 34: Elektronik ins Gehäuse einsetzen
X
Bild 35: Mittleres Zahnrad und Achsen einsetzen
Bild 35: Mittleres Zahnrad und Achsen einsetzen
X
Bild 36: Seitliche Zahnräder einsetzen
Bild 36: Seitliche Zahnräder einsetzen
X
Bild 37: Letztes Zahnrad einbauen
Bild 37: Letztes Zahnrad einbauen
X
Bild 38: Gehäusedeckel aufsetzen
Bild 38: Gehäusedeckel aufsetzen
X
Bild 39: Gehäuseboden und Schrauben wieder einsetzen
Bild 39: Gehäuseboden und Schrauben wieder einsetzen
X
Bild 40: Fertig ist der Umbau
Bild 40: Fertig ist der Umbau
Das könnte dich auch langweilen:
Autonome Mobile Roboter
Roboter mechanisches Chassis Bauanleitung

Modellbauservos
Servostecker Belegung

Nur für wahre Nerds
Electronicsplanet Roboterprojekte

Projekte
Elektronisches Katzenkatapult